
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 1, 2018
En el presente trabajo se expone la implementación de una prótesis funcional de una mano como una alternativa al tratamiento integral para la rehabilitación de personas que han padecido de una amputación transradial. Para controlar el movimiento de la prótesis, un microcontrolador ejecuta el accionamiento de los mecanismos de la prótesis en base a las señales mioeléctricas recibidas por los electrodos colocados en los músculos del antebrazo de la persona, de esta manera el usuario puede controlar los movimientos de la prótesis de acuerdo a sus necesidades.
Palabras clave: prótesis funcional, señales mioeléctricas, amputación transradial.
In the present work the implementation of a functional hand prosthesis is exposed as an alternative to the integral treatment for the rehabilitation of people with transradial amputation. To control the movement of the prosthesis, a microcontroller perform the activation of the mechanisms of the prosthesis based on myoelectric signal received by the electrodes placed on the forearm muscles of the person, in this way the user can control the movements of the prosthesis according to their needs.
Key words: Functional prosthesis, myoelectric signals, transradial amputation.
Hoy en día existen una gran cantidad de personas que han sufrido la amputación de una extremidad del cuerpo [1]. La amputación transradial conlleva a una discapacidad motriz imposibilitando a las personas para realizar tareas de manipulación de objetos [2]. Este tipo de discapacidad implica la ayuda de otra persona o de alguna prótesis para realizar actividades de la vida cotidiana. En este contexto, existen prótesis que solo cumplen con una función estética por lo que carecen de ergonomía y flexibilidad en sus movimientos. Además, este tipo de prótesis, por su falta de flexibilidad, obliga a las personas a compensarlas cambiando los movimientos de sus brazos y cuerpo. Tales movimientos a menudo ceden a lesiones de articulación [3]. Además, existen diseños de prótesis funcionales en base a señales mioeléctricas y reconocimiento de patrones, con mayor flexibilidad al tener más grados de libertad [4-7]. Este tipo de prótesis, comercialmente, aún tiene un alto costo. Asimismo, en México existe un déficit de producción de prótesis por lo que la mayor parte de los pacientes amputados no tienen acceso a terapias de rehabilitación. Esta situación representa un problema económico y de salud muy importante que no está siendo atendido de manera integral [1]. Para dar solución a estas problemáticas se construyó el control de una prótesis funcional elaborada mediante impresión 3D a un bajo costo capaz de ayudar en el tratamiento integral para la rehabilitación de personas que han padecido de una amputación transradial.
El uso de señales de mioeléctricas para controlar el movimiento de las prótesis de extremidad superior ofrece a las personas con amputación transradial una autonomía de control mediante la contracción de algunos de sus músculos. El esquema de control mioeléctrico se realiza mediante el reconocimiento de patrones detectando cuando se contrae el musculo para poder activar el movimiento de la mano. En el presente trabajo, la implementación de la prótesis funcional de la mano izquierda consta de la siguiente metodología.
Primero se imprimió el diseño 3D de la prótesis realizada por [8], la cual se muestra en la figura 1(a), del cual se obtuvo la prótesis de la mano izquierda mostrada en la figura 1(b). Posteriormente se realizó el mecanismo del movimiento de las articulaciones de la mano utilizando dos servomotores y polímeros como elementos tensores para abrir o cerrar los dedos de la prótesis.
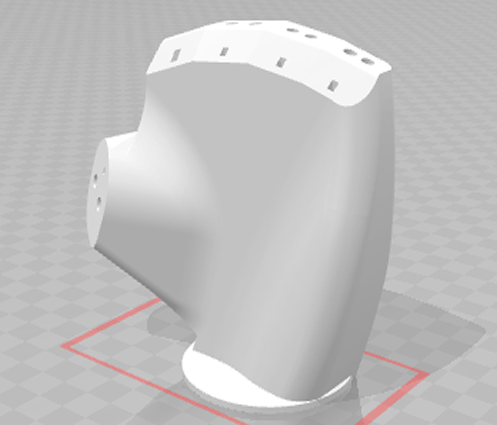
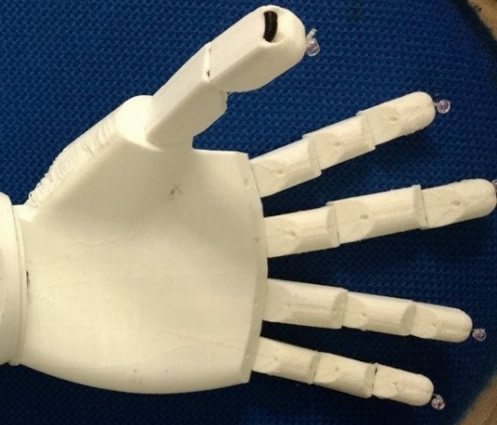
Figura 1. (a) Diseño 3D de una sección de la prótesis de la mano, (b) Impresión 3D de la prótesis de la mano
Enseguida se desarrolló el control electrónico de la prótesis, la cual se constituye por tres etapas, como se muestra en el diagrama de la figura 2.
La primer etapa consta en la adquisición, filtrado y amplificación de la señales provenientes de los electrodos; la segunda etapa consta en el acondicionamiento de las señales a los niveles de tensión TTL requeridos por el microcontrolador y la tercer etapa consiste en el acondicionamiento de las señal digitales en señales de potencia requeridas por los servomotores para el funcionamiento de la prótesis. Estas señales son mostradas en la figura 3, en la cual, la señal amarilla representa la señal mioeléctrica adquirida por los electrodos; la señal verde representa la señal mioeléctrica filtrada y amplificada; la señal morada es la señal adecuada a los niveles de voltaje requeridos por el microcontrolador.
Finalmente se implementó en un microcontrolador PIC-16F688 el algoritmo de interpretación de las señales mioeléctricas para ejecutar el movimiento de las articulaciones de la mano, la cual se basa en la detección del nivel en alto de la señal de salida proveniente de la etapa de acondicionamiento de la señal mioeléctrica para accionar el mecanismo de los servomotores mediante una señal PWM, como se muestra a en la figura 4. En esta figura la señal amarilla representa la señal de entrada del controlador, proveniente del acondicionamiento de la señal mioeléctrica, mientras que la señal verde representa la señal de salida del control de los servomotores mediante PWM. La señal PWM con mayor tiempo en alto indica la apertura de la mano con un desplazamiento del servomotor de 180°, y la señal PWM con menor tiempo en alto indica el cierre de la mano con un desplazamiento del servomotor de 0°.
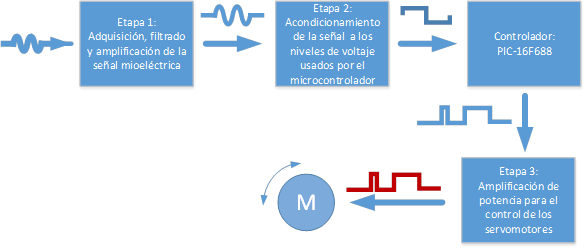
Figura 2. Control electrónico de la mioprótesis
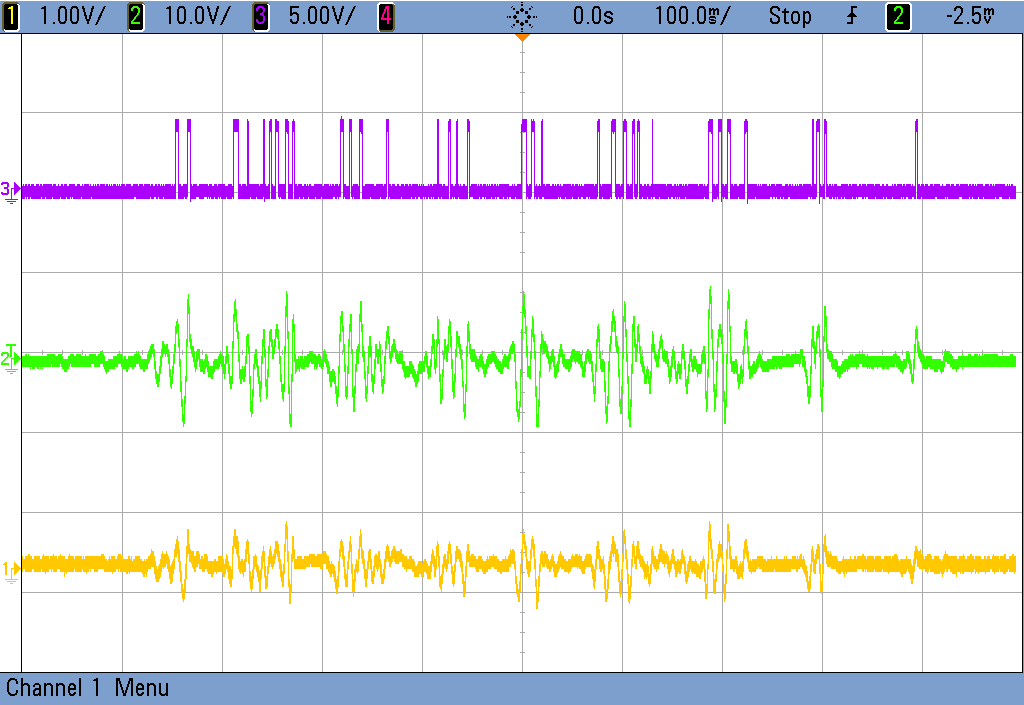
Figura 3. Tipos de señales eléctricas en cada una de las etapas de la instrumentación de la prótesis
Mediante la metodología propuesta se logró manipular el movimiento de la mioprótesis para poder sujetar y manipular diferentes tipos de objetos mediante la interpretación de los pulsos mioeléctricos obtenidos de la contracción del musculo del antebrazo, esta acción se muestra en la figura 5, en la cual la prótesis sujeta un teléfono inteligente.
De esta manera se tiene una opción adicional para el tratamiento de rehabilitación de personas con amputación transradial a un bajo costo para poder reincorporase a las actividades cotidianas y a una vida laboral.
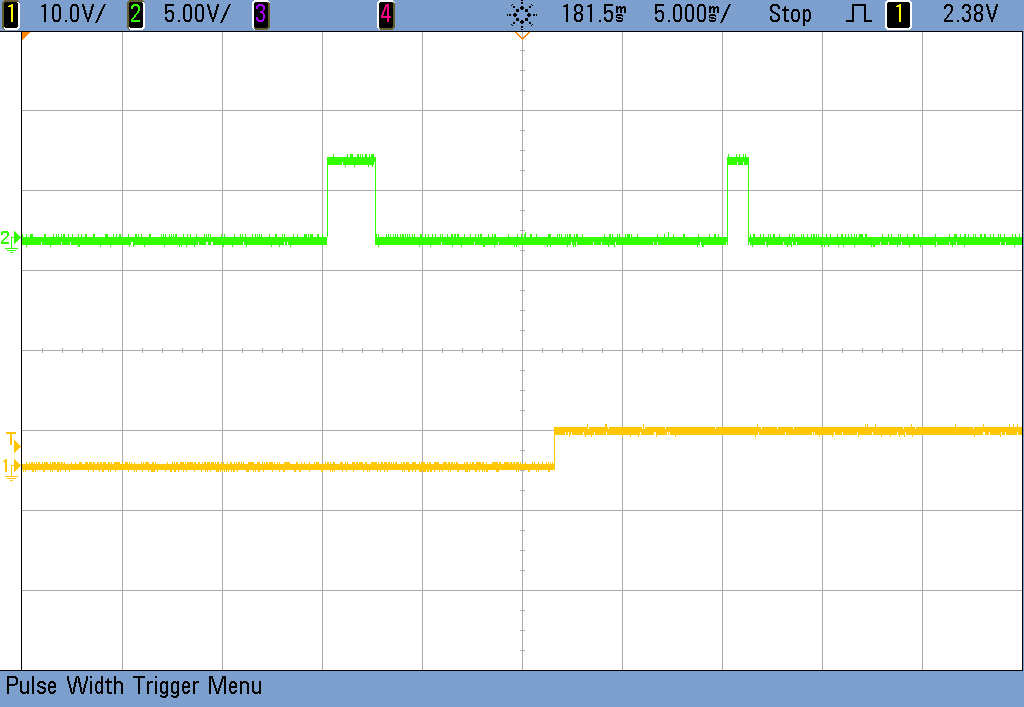
Figura 4. Señales de entrada y salida del controlador de la mioprótesis

Figura 5. Mioprótesis funcional de mano izquierda usando tecnología de impresión 3D y control electrónico
Actualmente existen personas discapacitadas que carecen de alguna extremidad superior.
Existen prótesis rígidas hechas de goma, las cuales no son funcionales.
No existe un mercado suficiente de prótesis funcionales que cumpla con la tecnología y costo acorde al presupuesto de una familia de bajos recursos.
Gran parte de la población en México que tiene algún tipo de amputación no tiene acceso a una rehabilitación integral.